Skip to content
ISR Researchers Around the World | Rute Luz @ESA
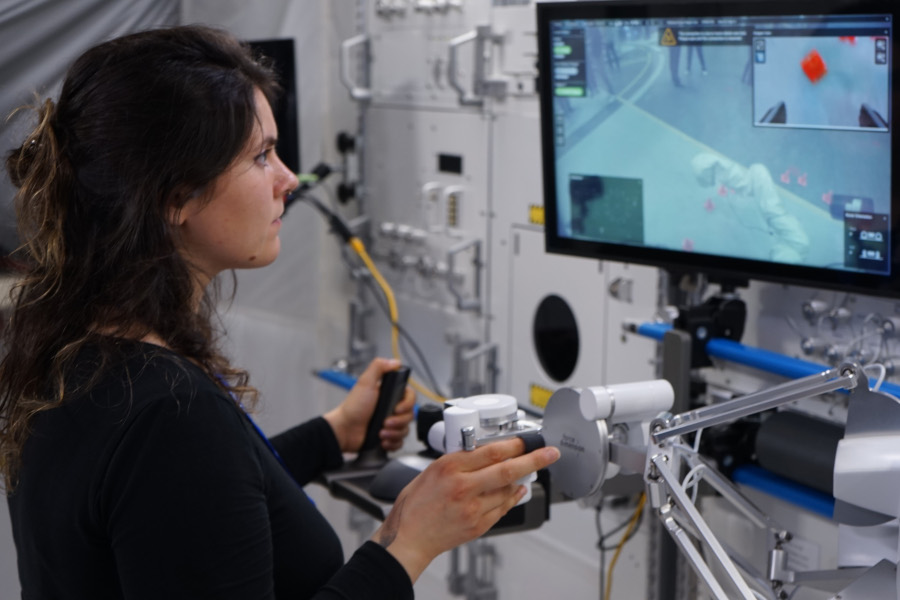
Her Ph.D. advisor, Rodrigo Ventura, was at a conference when he saw a paper about a teleoperation setup presented by Thomas Krüger, head of the Human-Robot Interaction Lab at ESTEC. At the end of his presentation, Thomas shared that the setup was currently at the International Space Station and that it could be used by any researcher who wanted to study interaction with such devices. “I immediately started writing!” Rute explained. “We had learned from our participation in the AMADEE-20 analog mission that haptic feedback – simulating what it would feel like to interact with something in real life – can be very useful, but we had too many control points so it didn’t work as productively.”
She proposed using that single device, which has seven degrees of freedom and all the needed components, to control the robot and give real-time feedback to the user. Rute was accepted and spent seven months at the ESTEC lab, trying to implement a system that responds to forces from the user in a more complex way, with vibration when there is traction loss, by resisting when there is no space and more.
“We managed to show that it was possible to implement such things in a device previously used for telemanipulation, instead of creating it from scratch. Since the device was already very flexible in the ways it could give feedback, I had to break down each interaction you could have with reality and translate that into similar forces emitted by the device.” They went further than most haptic feedback in devices made to control robots. Besides the usual resistance when you hit an obstacle, Rute also developed cues that help in the ability to recognize the spatial location of the body, in this case the robot. “Before, you would have a robot for each interface and multiple operators. Then it shifted to one robot, one interface and one operator. Nowadays we are working on multiple robots and a single interface for one operator and that’s a great scientific challenge.”
While at ESA Rute validated her research with user studies and she plans to publish the results of those studies soon. “It was interesting because the timing worked out really well. I got to apply a lot of what we developed during AMADEE-20 and now I get to take what I learned to the next mission, AMADEE-24”. At that lab, Rute claims to have learned a lot by watching how different researchers worked on parallel projects and by seeing different ways of doing things.
“Working at that lab was like a dream for me…I always wanted to work in the field of Space and there weren’t a lot of opportunities in Portugal at the time, so I created my own. Years later, when I got closer to going to that actual lab, I could say that I already had some of the skills required and that made it much easier to go and work with them!”
Related stories
Share This Story, Choose Your Platform!








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}