Even though it’s a tremendously inhospitable environment to humans, space exploration continuously pushes the boundaries of humanity’s reach. When it comes to protecting humans from the harsh conditions of such environments robotic platforms can be a great asset to minimize exposure, much like it’s done on Earth’s most remote locations. Using a mobile robot for reconnaissance can be useful in terms of identifying places of interest and locations of risk, with the human being safe inside the habitat or in the mission control room, teleoperating the robot.
Here on Earth, we know that teleoperating a vehicle always presents challenges, since the operator and robot are not physically connected. The user needs to understand the situation and behaviour of the robot while making sure that valuable data is being acquired and the safety of the mobile vehicle is assured. Events as simple as the loss of traction can leave the operator confused. Consequently, an important goal is to design an interface that supports the user’s situation awareness, merging both ends of the mission, by giving real-time feedbacks such as traction state and orientation in altitude.
This is the interest of a team providing expertise on human-robot interaction, composed by Principal Investigators Rodrigo Ventura and José Luís Silva, and researchers Rute Luz and José Corujeira. This research team has been pre-selected for the AMADEE-20 Mission, led by the Austrian Space Forum, hosted in Israel by the Israel Space Agency and supported by D-MARS. The goal is to learn from realistic Mars human-robotic surface activities, by October and November 2020. They are proposing specific experiments during the expedition in order to evaluate teleoperation solutions to command a rover on the near extraterrestrial environment provided by the AMADEE-20 campaign. The group has been pre-selected among eighteen other research projects in multidisciplinary areas and is currently looking for funding sources to support the travel expenses to the mission site.
“We believe that such an environment possesses specific aspects hard to replicable elsewhere. In particular, the unfamiliarity of the surrounding environment by the crew, the criticality of the mission conditions, and the tight constraints in terms of crew time, make the AMADEE-20 a particularly relevant use case…this study will provide experimental support for the application of these haptic technologies for space exploration.”
José Corujeira participated in the preparatory teleconferences and science definition workshop that showcased the procedures, in preparation for the simulation. This is an important factor towards the collaboration with other teams, to be able to enhance the situational awareness of the astronauts during the teleoperation of a planetary rover.
“Being on-site implies being able to acquire as much information as possible in a limited amount of time, for actions that can get complicated, like taking samples or updating sensors. An extra ‘eye’ or ‘hand’ may be crucial in a space mission environment. We would really like that by the end of the mission the astronauts come to us with the feedback that our tools were a true improvement to the quality of their actions.”
More about AMADEE-20: https://oewf.org/en/portfolio/amadee-20/
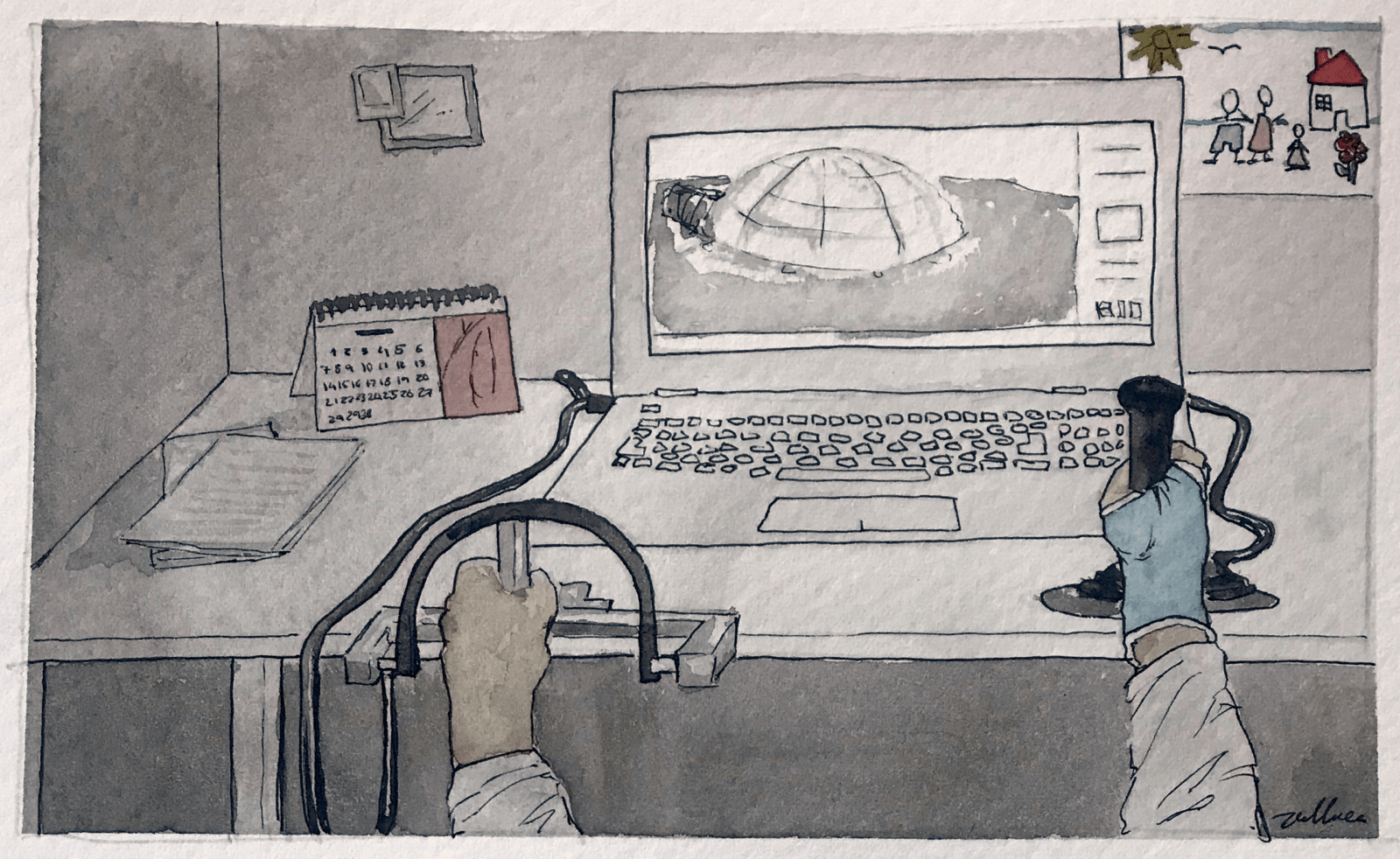
Sketchs by Catarina Aguiar






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}